15 KiB
Einführung - Übersicht Bildverarbeitungsprozess
Bildverarbeitung
Bildverarbeitung / Bildanalyse
- Wissenschaft von der algorithmischen Verarbeitung von Informationen in Bildern
- Ziel: Ableitung relevanter (nützlicher) Parameter
- Anwendung in nahezu allen Bereichen von Wissenschaft und Technik, Medizin und Alltag
Vorlesung BVM
- Grundlagen der Digitalen Bildverarbeitung
- Anwendungsfokus: Medizinische Bildverarbeitung
Anwendungsfelder digitaler Bildverarbeitung
- Medizinische Diagnostik und Therapie
- Röntgen, CT, DSA, PET, SPECT, Ultraschall, MRI, fMRI, OCT
- Biolog. Bildgebung
- Histologie, Mikroskopie, Zählung, Klassifikation u. Morphologie von Zellen, Bewegungsanalyse, Wachstum
- Forensik / Rechtsmedizin
- Fingerabdruck, Gesichtserkennung
- Mensch-Maschine-Kommunikation / Robotik
- Gestenerkennung, Zeichensprache, Orientierung im Raum
- Dokumentenverarbeitung
- Automatische Texterkennung (OCR), Scannen, Archivieren, Fotografie
- Industrie / Materialforschung
- Qualitätssicherung, automatisches Zählen, Komponentenerkennung
- Remote Sensing
- Ernte, Wetter, Vermessung, Militär, Astronomie
Medizinische Bildverarbeitung
- Anwendungsfelder
- Diagnose
- Screening
- OP-Planung
- Bestrahlungsplanung
- Ausbildung
- Eigenschaften
- Große Komplexität / multimodal (verschiedene bildgebende Verfahren)
- Variabilität der Objekte /individuelle Unterschiede
- Große Bedeutung feinster Strukturen
- Dreidimensionale / dynamische Bilddaten
- Vergleichbarkeit mit Standardfällen
- Hohe Robustheit notwendig
Modellgestützte Interpretation
- Bildinformationen
- Modell- bzw. anwendungsspezifische Interpretation des Bildes
- Bild nur unter Erwartungshaltung bzw. mit Hilfe eines Modells interpretierbar
- Können verfälscht oder widersprüchlich sein
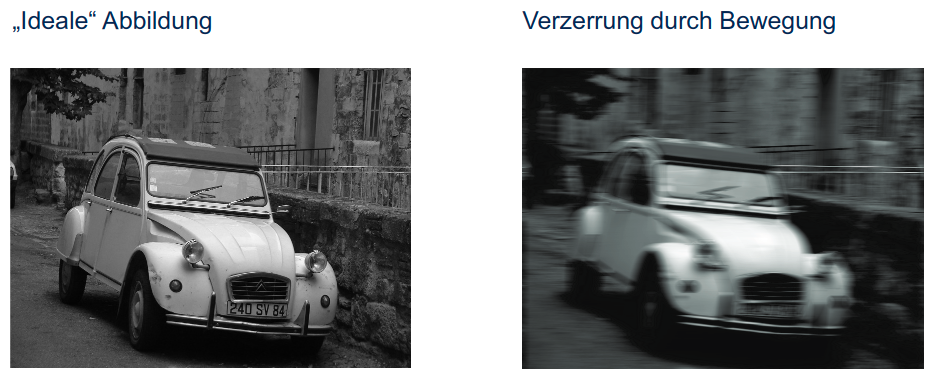
- Bildrestauration
- ''Pin Cushion'' Verzerrung, ''Barrel'' Verzerrung
- Verzerrung durch Bewegung (Restauration durch inverse Filterung)
- Fokussierungsunschärfe
- Verrauschtes Bild -> Gauß-Filter
- ,,Salz und Pfeffer'' Rauschen -> Medianfilter
- Kontraständerung
- Bildregistrierung
- Segmentierung
- Schwellwertsegmentierung
- Erkennung von Kreisen (Hough-Transformation)
- Merkmale und Klassifikation
Vorlesungsinhalt
- Einführung
- Bildverarbeitungsprozess
- Bildrepräsentation und Bildeigenschaften
- Ortsbereich
- Spektralbereich
- Diskrete 2D-Faltung
- Bildvorverarbeitung
- Bildrestauration
- Bildregistrierung
- Bildverbesserung
- Segmentierung
- Pixel- bzw. histogrammbasierteSegmentierung
- Regionen-basierte Segmentierung
- Kantenbasierte Segmentierung
- Wasserscheidentransformation
- Modellbasierte Segmentierung
- Morphologische Operationen
- Morphologische Basisoperationen
- Entfernen von Segmentierungsfehlern
- Bestimmung von Formmerkmalen
- Merkmalsextraktion und Klassifikation
- RegionenbasierteMerkmale
- Formbasierte Merkmale
- Einführung in die Klassifikation
Bildrepräsentation und Bildeigenschaften im Ortsbereich
Ortsbereich
Kontinuierliche Bilder
Wiederholung: Kontinuierliche Signale
Das kontinuierliche Signal
Definition: x(t)\in\mathbb{R} eindimensionale Funktion
- kontinuierliche Zeitvariable
t\in\mathbb{R} - Funktionswert x = kontinuierlicher Signalwert (Spannung, Strom, ...)
Dirac Stoß
- Definition:
\inf_{-\infty}^{\infty} \delta(t) dt=1,\delta(t)=\begin{cases}\rightarrow\infty\quad \text{ für } t=0\\ 0\quad\text{ für } t\not= 0\end{cases} - Approximation (Definition):
\delta(t)=lim_{\epsilon\rightarrow 0} \frac{1}{\epsilon}* rect(\frac{t}{\epsilon}) - Symmetrie
\delta(-t)=\delta(t) - Stoßgewicht
\inf_{-\infty}^{\infty} a\delta(t)dt = a - Ausblendeigenschaft (Siebeigenschaft)
u(t)*\delta(t-\tau)=u(\tau)*\delta(t-\tau) - Faltung
\inf_{-\infty}^{\infty} u(t)*\delta(t-\tau)d\tau = u(t)*\delta(t)=u(t) - Verschiebung
u(t)*\delta(t-\tau)=u(t-\tau) - Fourier Transformierte
\delta(t) \laplace 1,1\Laplace \delta(f)
1D Faltung
- Definition:
u_1(t)*u_2(t)=\inf_{-\infty}{\infty} u_1(\tau) * u_2(t-\tau) d\tau - Kommutativgesetz:
u_1(t)*u_2(t)=u_2(t)*u_1(t) - Assoziativgesetz:
[u_1(t)*u_2(t)]*u_3(t)=u_1(t)*[u_2(t)*u_3(t)] - Distributivgesetz:
u_1(t)*[u_2(t)+u_3(t)]= u_1(t)*u_2(t) + u_1(t)*u_3(t) - Neutrales Element: (Einheitselement)
u(t)*\delta(t)=\inf_{-\infty}^{\infty} u(\tau)*\delta(t-\tau)d\tau = u(t) 
LTI (Linear Time-Invariant) Systeme
x(t)\rightarrow LTI System g(t) \rightarrow y(t)- Eingang/Ausgang:
y(t)=x(t)*g(t) \fourier Y(f)=X(f)*G(f) - Kausalität
g(t)=0gilt fallst<0 - BIBO Stabilität
\inf_{-\infty}^{\infty} |g(t)|dt < \infty - Sprungantwort / Stoßantwort
h(t)=\inf_{-\infty}^t g(\tau)d\taug(t)=\frac{d}{dt} h(t)
Kontinuierliche Bilder
Das kontinuierliche Bild: Definition als 2D-Grauwertfunktion
Definition: g(x, y) \in\mathbb{R} \rightarrow zweidimensionale Funktion
- g: Funktionswert = kontinuierlicher Grauwert (Lichtstärke oder Schwächung von Röntgenstrahlung)
- kontinuierliche Ortsvariablen
xundy:x,y\in\mathbb{R}
Alternativ: g(\underline{r})\in\mathbb{R} mit \underline{r}=\binom{x}{y}\in\mathbb{R}^2 mit Ortsvektor \underline{r}
Bild als 2D Grauwertfunktion: 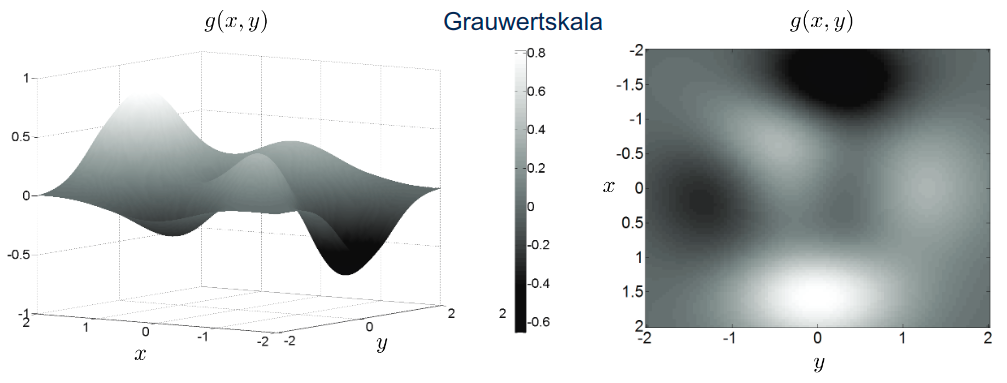
Beispiel 2D Rechteck
g(x,y)=rect(x,y)=\begin{cases} 1\quad\text{ für } |x,y|\leq 0,5\\ 0 \quad\text{ sonst}\end{cases}g(x,y)=rect(x,y)=rect(x)*rect(y)=g_1(x)*g_2(y)- ...ist eine separierbare Funktion, d.h.
g(x,y)=g_1(x)*g_2(y) 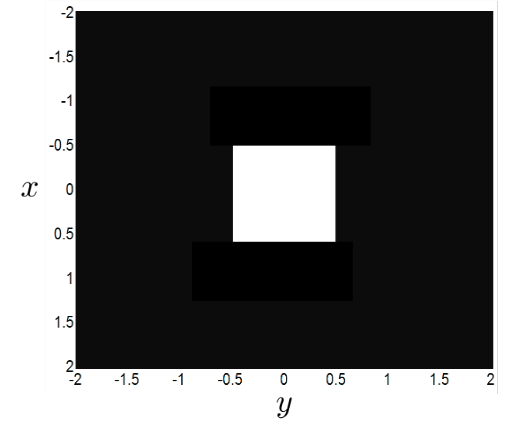
Beispiel: 2D Rechteck skaliert
g(x,y)=rect(\frac{x}{\epsilon_x}, \frac{y}{\epsilon_y})=\begin{cases} 1\quad\text{ für } |\frac{x}{\epsilon_x},\frac{y}{\epsilon_y}\leq 0,5 \\ 0\quad\text{ sonst } \end{cases}g(x,y)=rect(\frac{x}{\epsilon_x}= rect(\frac{x}{\epsilon_x}) * rect(\frac{y}{\epsilon_y})- ... ist eine separierbare Funktion, d.h.:
g(x,y)=g_1(x)*g_2(y) 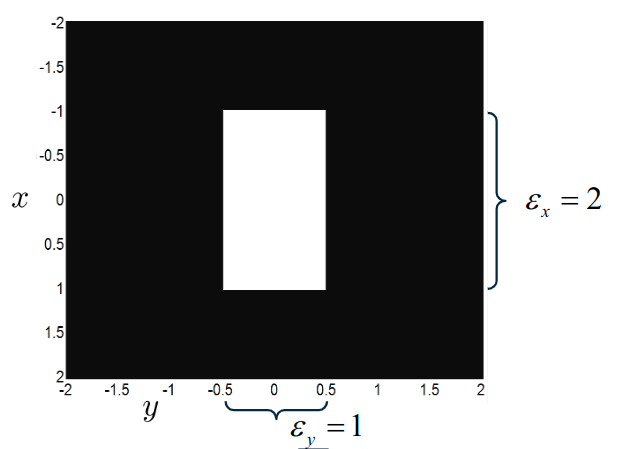
Beispiel: Approximation des 2D Dirac-Stoßes
\delta(x,y)=lim_{\epsilon\rightarrow 0} \frac{1}{\epsilon^1} * rect(\frac{x}{\epsilon},\frac{y}{\epsilon})- ... ist ebenso separierbar, d.h.:
\delta(x,y)=\delta(x)*\delta(y) 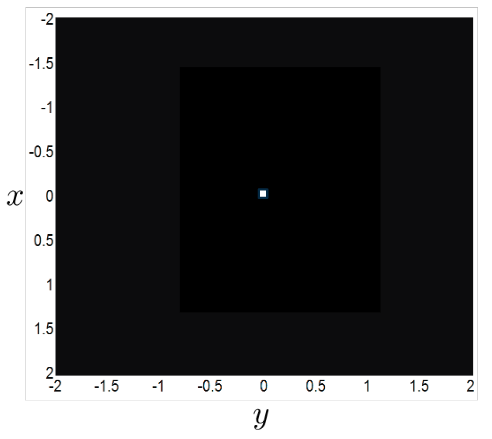
2D-Dirac-Stoß
- Definition:
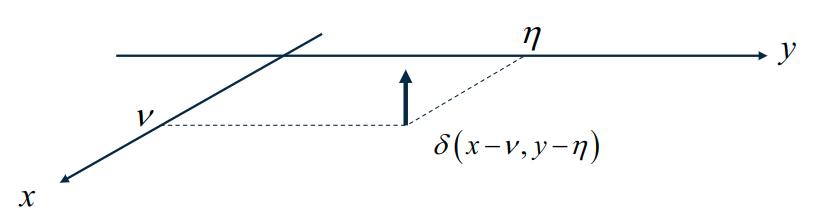
\delta(x,y)=\begin{cases} \rightarrow\infty \quad\text{ für } x,y=0 \\ 0 \quad\text{ für } x,y\not=0\end{cases} \inf_{-\infty}^{\infty} \inf_{-\infty}^{\infty} \delta(x,y)dx dy=1- Verschobener Dirac-Stoß:
\delta(x-v, y-\eta) - Abtasteigenschaft (Ausblendeigenschaft)
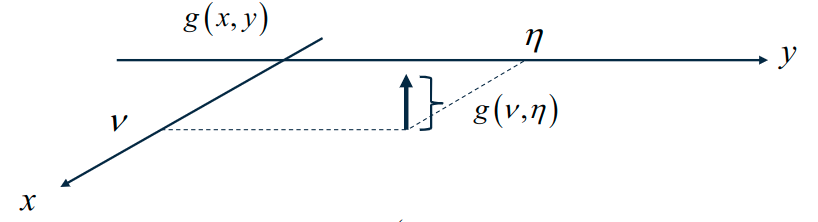
- weil
\inf_{-\infty}^{\infty} \inf_{-\infty}^{\infty} \delta(x,y)dx dy=1 g(v,\eta)=\inf_{-\infty}^{\infty} \inf_{-\infty}^{\infty} g(x,y) * \delta(x-v, y-\eta) dx dy- Mit Hilfe eines um
v, \etaverschobenen 2D-Dirac-Stoßes lässt sichg(x,y)an den Ortskoordinatenv,\etaabtasten\rightarrow g(v,\eta)
- 2D-Faltung mit Dirac Stoß:
g(x,y)=\inf_{-\infty}^{\infty} \inf_{-\infty}^{\infty} g(x,y) * \delta(x-v, y-\eta) dv d\eta = g(x,y) ** \delta(x,y)- Die Faltung eines Bildes
g(x,y)mit dem 2D-Dirac-Stoß ergibt wieder das Bildg(x,y). \delta(x,y)=Einheitselement (neutrales Element) der 2D Faltung
- Die Faltung eines Bildes
Lineare kontinuierliche Operatoren / Point Spread Function
Eigenschaft: g_2(x,y)=U\{g_1(x,y)\}
Linearität: O\{a_1g_{11} (x,y) +a_2g_{22}(x,y)\}=a_1*O\{g_{11}(x,y)\} + a_2*O\{g_{22}(x,y)\}
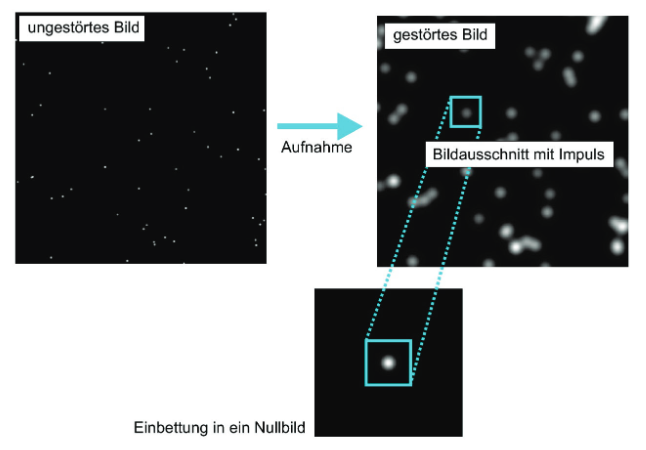
Ein- / Ausgangsbeziehung: g_2(x,y) = Ο\{g_1(x,y)\}= \inf_{-\infty}^{\infty}\inf_{-\infty}^{\infty} g_1(v,\eta)*O\{\delta(x-v,y-\eta)\} dv dn
Impulsantwort (Point Spread Function) g_2(x,y)=\inf_{-\infty}^{\infty}\inf_{-\infty}^{\infty} g_1(v,\eta)*h(x,y,v,\eta)dv d\eta
Für räumlich invariante (verschiebungsinvariante) Operatoren gilt: h(x,y,v,\eta)=O\{\delta(x-v,y-\eta)\}=h(x-v,y-\eta)
2D-Faltung mit der Impulsantwort des linearen Operators (Point SpreadFunction): g_2(x,y)=\inf_{-\infty}^{\infty}\inf_{-\infty}^{\infty} g_1(v,\eta)*h(x-v,y-\eta)dv dn = g_1(x,y) * * h(x,y)
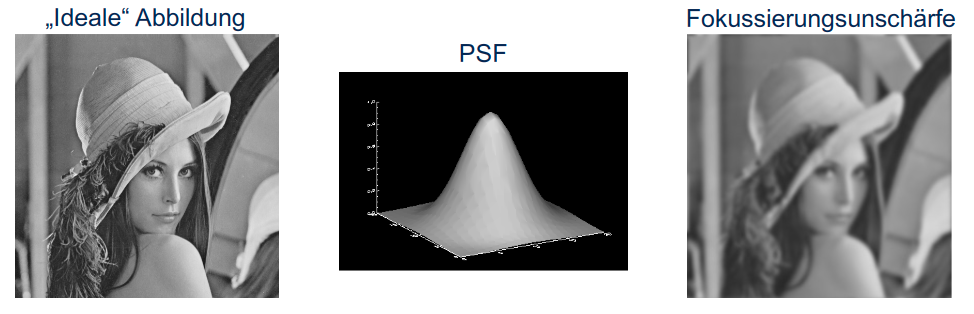
Point Spread Function (PSF)
Beispiel Fokussierungsunschärfe
Beispiel Bewegung
Digitale Bilder
Diskretisierung und Quantisierung
Digitalisierung: Diskretisierung der Ortsvariablen
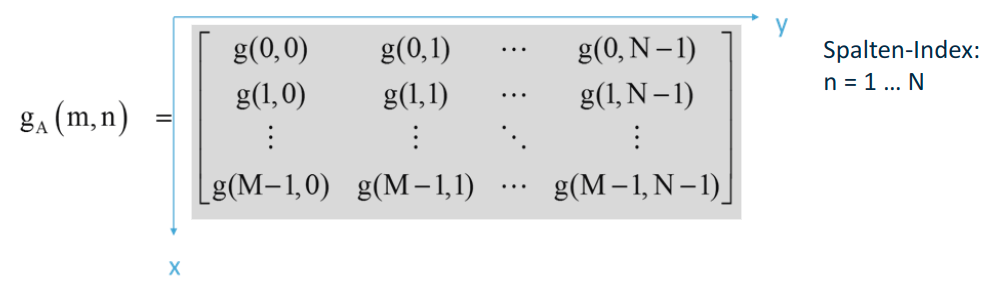
Abtastfunktion: s(x,y)=\sum_{m=-\infty}^{\infty} \sum_{n=-\infty}^{\infty} \delta(x-m*\Delta x, y-n*\Delta y)
Abtastung: g_A(x,y)=s(x,y)*g(x,y)=\sum_{n=-\infty}^{\infty} \sum_{m=-\infty}^{\infty} g(m*\Delta x, n*\Delta y)* \delta(x-m*\Delta x, y-n*\Delta y)= A_{\Delta x, \Delta y}\{g(x,y)\}
Repräsentation des ortsdiskreten Bildes unabhängig von \Delta x, \Delta y: \rightarrow g_A(m,n) (,,2D-Zahlenfolge'')
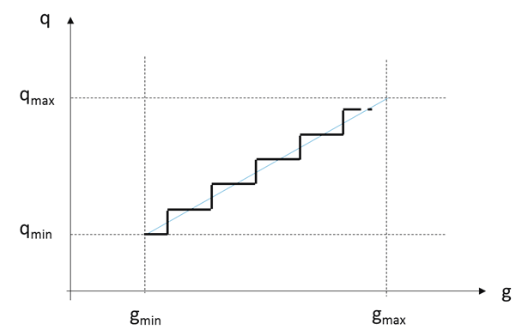
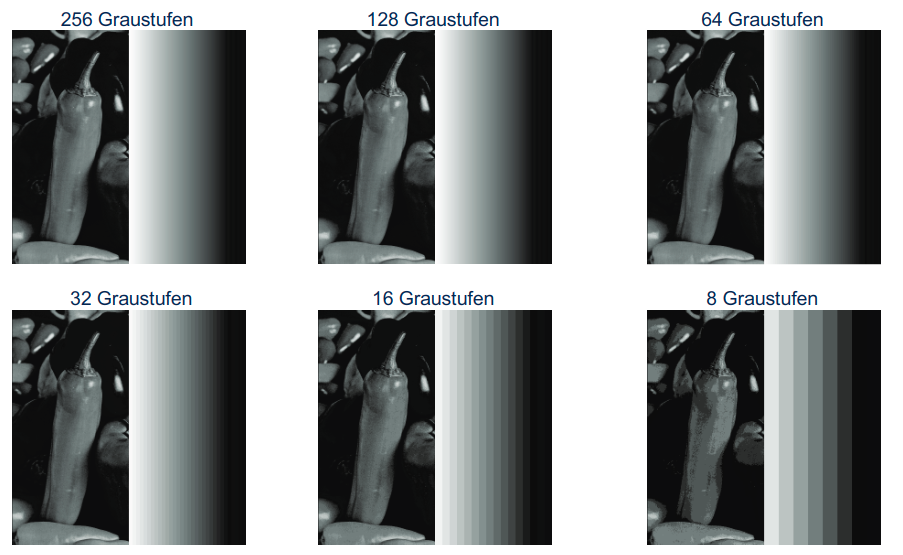
Digitalisierung: Quantisierung der Grauwerte
q(g)=[\frac{g-g_{min}}{g_{max}-g_{min}} * (q_{max}-q_{min}) +q_{min}]_{mathbb{N}} (Runden auf nächste natürliche Zahl)
häufig wird q_{min}=0 gewählt: q(g)=[\frac{g-g_{min}}{g_{max}-g_{min}}*q_{max}]_{mathbb{N}}
q_{max}=2^N -1, N Auflösung des AD-Wandlers
Digitale Bildrepräsentation
Pixel ![]()
Grauwertbild 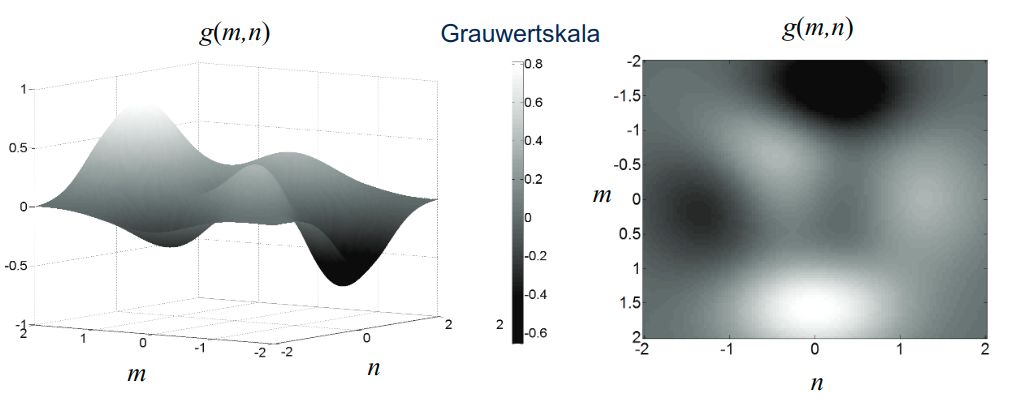
Falschfarbendarstellung 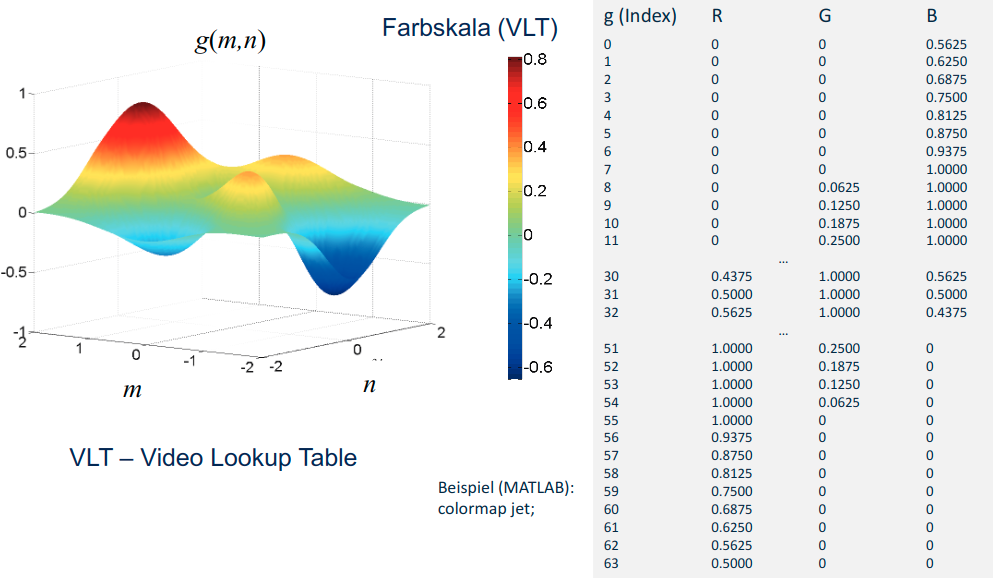
Nachbarschaft, Pfad, Zusammenhang und Distanzmaße
Nachbarschaften
- 4er-Nachbarschaft
- Nachbarpixel: gemeinsame Kante
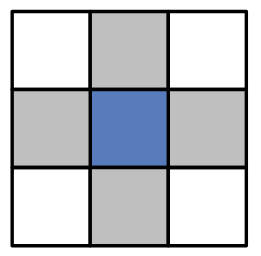
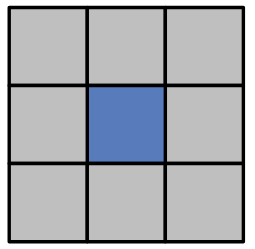
- 8er-Nachbarschaft
- Nachbarpixel: gemeinsame Kante oder Ecke
- Regelmäßige 2D-Gitter
- Dreieckgitter

- 3-Nachbarschaft
- 12-Nachbarschaft
- Quadratisches Gitter
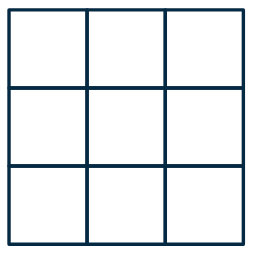
- 4-Nachbarschaft
- 8-Nachbarschaft
- Hexagonales Gitter
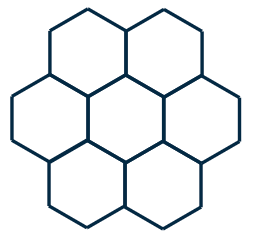
- 6-Nachbarschaft
- Dreieckgitter
Pfad:
- Zwei Pixel
P_A(m_A,n_A)undP_B(m_B,n_B)sind durch einen Pfad verbunden, falls es eine Folge von benachbarten Pixeln(P_A, P_1, ..., P_B)gibt, für die eine Homogenitätsbedingung (z.B. alle Pixel haben gleichen Grauwert, d.h.g(P_A)=g(P_1)=...=g(P_B))gilt. - Offener Pfad:
P_A \not= P_B - Geschlossener Pfad:
P_A = P_B - Pfade sind an Nachbarschaftsdefinitionen gebunden!
Zusammenhang: Eine Menge von Pixeln ist zusammenhängend, wenn zwischen zwei beliebigen Pixeln ein Pfad existiert.
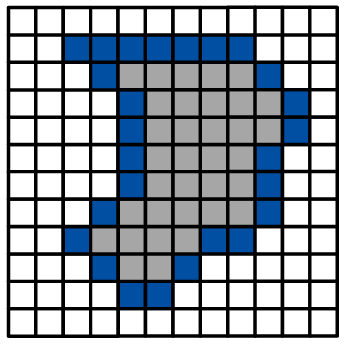
Zusammenhang: Definition gemäß Nachbarschaftsbeziehung
- Zusammenhang gemäß 4-Nachbarschaft
- Die beiden grauen Regionen sind unter 4-Nachbarschaft nicht zusammenhängend (kein verbindender Pfad vorhanden).
- Der Hintergrund ist unter Annahme der komplementären8-Nachbarschaft zusammenhängend.
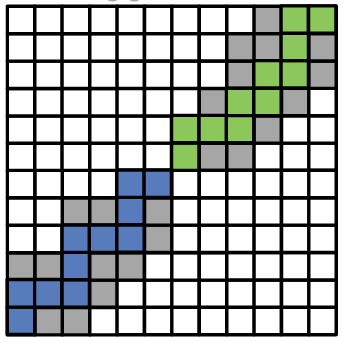
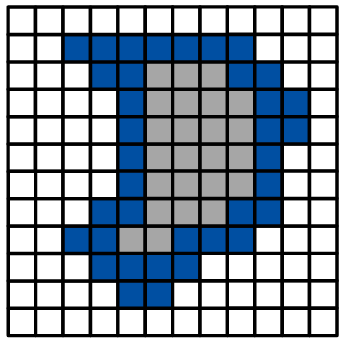
- Zusammenhang gemäß 8-Nachbarschaft
- Die beiden grauen Regionen sind unter 8-Nachbarschaft zusammenhängend (verbindender Pfad vorhanden).
- Der Hintergrund ist unter Annahme der komplementären4-Nachbarschaft nicht zusammenhängend.
- Die Nachbarschaftsdefinitionen in Vorder-und Hintergrund sollten komplementär sein!
Rand:
- Der Rand einer zusammenhängenden Pixelmenge
Mist eine Folge von Pixeln inM, die mindestens einen Nachbarn haben, der nicht zuMgehört. - Die Randpixel gehören somit zu
Mdazu. - Der Rand ist ein zusammenhängender Pfad und deshalb auch an eine Nachbarschaftsdefinition gebunden.
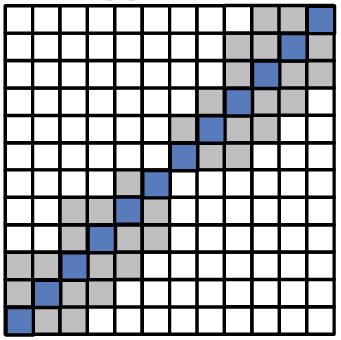
Rand: Definition gemäß Nachbarschaftsbeziehung
- Rand in 4 - Nachbarschaft zum Hintergrund
- Jedes Randpixel hat mind. einen Nachbarn in 4-Nachbarschaft, der nicht zu M gehört.
- Rand = zusammenhängender Pfad gemäß 8-Nachbarschaft
- Rand in 8 - Nachbarschaft zum Hintergrund
- Jedes Randpixel hat mind. einen Nachbarn in 8-Nachbarschaft, der nicht zu M gehört.
- Rand = zusammenhängender Pfad gemäß 4-Nachbarschaft
Distanzmaße zwischen zwei Pixeln
Euklidische Distanz
- Länge der direkten Verbindung
D_E= ||P_1-P_2||_2=\sqrt{(m_1-,_2)^2 + (n_1-n_2)^2}- Euklidische Norm
N=2,p=2 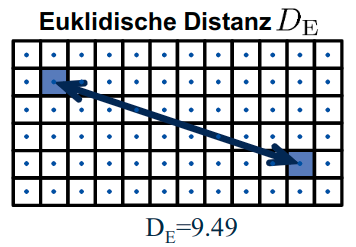
Manhattan-Distanz (City-Block)
- Länge des kürzesten Pfades unter 4er-Nachbarschaft
D_4=||P_1-P_2||_1=|m_1 - m_2|+|n_1-n_2|- Summennorm
N=2,p=1 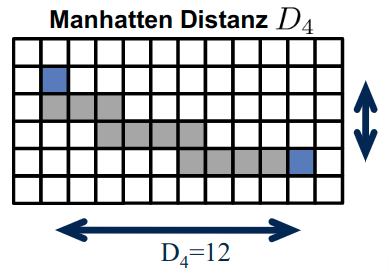
Schachbrett-Distanz
- Länge des kürzesten Pfades unter 8er-Nachbarschaft
D_8 = ||P_1-P_2||_{\infty} = max\{|m_1-m_2|, |n_1 -n_2|\}- Maximalnorm
N=2,p=\infty 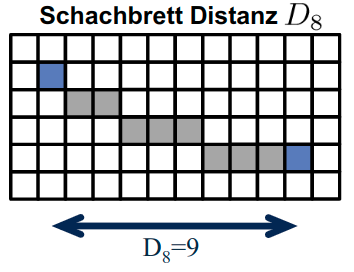
Normangabe der Distanzmaße
- p-Norm:
||x||_p = (\sum_{i=1}^N |x_i|^p )^{\frac{1}{p}}mitx_1=m_1-m_2undx_2=n_1-n_2 - Euklidische Norm:
N=2, p=2,D_E=(\sum_{i=1}^2 |x_i|^2)^{frac{1}{2}}=\sqrt{x_1^2 + x_2^2} - Summennorm:
N=2, p=1,D_4=(\sum_{i=1}^2 |x_i|)= x_1+x_2 - Maximalnorm:
N=2, p=\infty,D_8=lim_{p\rightarrow\infty}(x^p_{max} + (ax_{max})^p)^{\frac{1}{p}} = lim_{p\rightarrow\infty} (x_{max}^p (1+a^p))^{\frac{1}{p}} = x_{max}mita<1weillim_{p\rightarrow\infty}(a^p)=0 D_8\leq D_E \leq D_4- Schachbrett Distanz
\leqEuklidische Distanz\leqManhatten Distanz
Literaturempfehlungen
- Wilhelm Burger and MarkJ. Burge, ,,Digitale Bildverarbeitung – eine algorithmische Einführung mit Java'', Springer, 3. Auflage, 2015
- Klaus D. Tönnies, ,,Grundlagen der Bildverarbeitung'', Pearson Studium, 1. Auflage, 2005
- Heinz Handels, ,,Medizinische Bildverarbeitung'', Vieweg+Teubner, 2. Auflage, 2009
- Bernd Jähne, ,,Digitale Bildverarbeitung'', Springer, 6. Auflage, 2005
- Angelika Erhardt, ,,Einführung in die Digitale Bildverarbeitung'', Vieweg+Teubner, 1.Auflage, 2008
- Rafael C. Gonzales and Richard E. Woods, ,,Digital Image Processing'', Pearson International, 3. Edition,2008
- Geoff Dougherty, ,,Digital Image Processing for Medical Applications'', Cambridge University Press, 1. Edition, 2009
- William K. Pratt, ,,DigitalImageProcessing'', Wiley, 4. Edition, 2007
- John L. Semmlow, ,,Biosignal and Medical Image Processing'', CRCPress, 2. Edition, 2009