30 KiB
| title | date | author |
|---|---|---|
| Rechnerarchitekturen 2 | Wintersemester 20/21 | Robert Jeutter |
Einführung
Rechnerarchitektur = Programmierschnittstelle + Interner Aufbau\ Einheit von Struktur und Funktion
- Programmierschnittstelle
- Schnittstelle zwischen Rechner und Benutzer bzw. der Hardware und der untersten Softwareschicht
- Befehlssatzarchitektur (Instruction Set Architecture)
- Interner Aufbau
- Hardware-Aufbau von Komponenten, die die Rechnerarchitektur realisieren
- Speichereinheiten, Recheneinheiten, Verbindungssysteme,
Grundarchitekturen:
- Harvard (Zugriff direkt durch Prozessor)
- Princton/von-Neumann (Zugriff über Systembus)
| Speicher | Daten und Instruktionen speichern |
| Steuerwerk | beinhaltet Programmzähler um Ausführung zu steuern |
| Rechenwerk | auch ALU (Arithmetic and Logic Unit) um Berechnung durchzuführen |
Üblicherweise besitzt eine Recheneinheit (CPU) Daten- oder Rechenregister (Registermaschine). Berechnungen werden ausschließlich mit den Registern vorgenommen. Die Hauptaufgabe der Recheneinheit besteht darin,
- Daten aus Hauptspeicher in Register laden
- Berechnungsaufgaben durchführen
- Ergebnisse in Hauptspeicher ablegen
Klassifikation von Befehlssatzarchitekturen
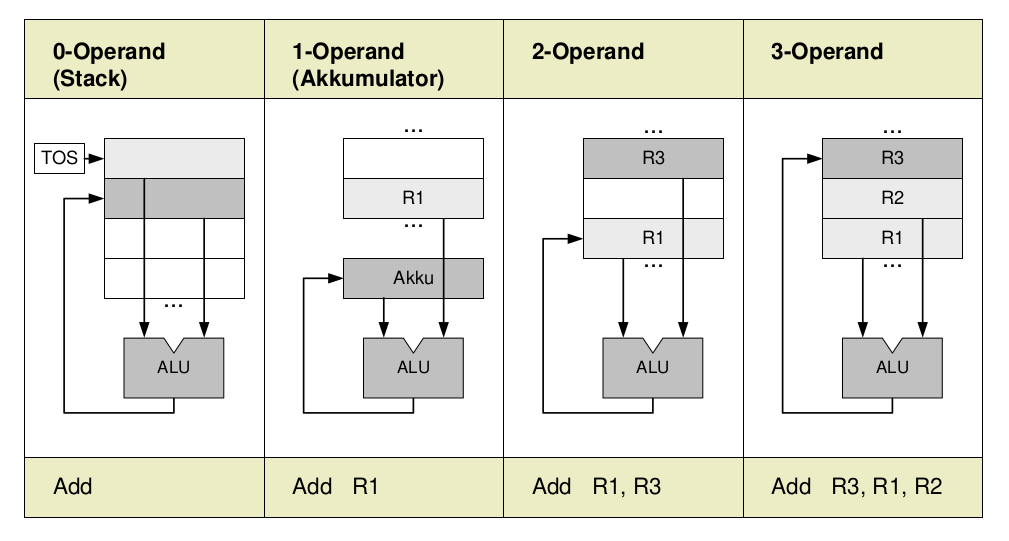
Prozessorarchitektur
Programmiermodelle, Instruction Set Architectures (ISAs): Klassifikation von Befehlssätzen nach der Gestaltung/Ausprägung der vorhandenen Maschinenbefehle
| CISC | RISC | MIPS |
|---|---|---|
| Complex Instruction Set Computing | Reduced Instruction Set Computing | Microprocessor without interlocked pipeline stages |
| Einfache und komplexe Befehle | wenige, einfache Befehle | 32-bit Architektur/64-bit Erweiterung |
| Heterogener Befehlssatz | Orthogonaler Befehlssatz | |
| Verschiedene Taktzahl pro Befehl | Meist 1 Takt pro Befehl | |
| Viele Befehlscode-Formate mit unterschiedlicher Länge | Wenige Befehlscode-Formate mit einheitlicher Länge | |
| Mikroprogrammwerk | Direktverdrahtung | |
| Vermischung von Verarbeitungs- und Speicherbefehlen | Trennung von Verarbeitungs- und Speicherbefehlen | |
| schwierig, unter CPI = 2 zu kommen | Hohe Ausführungsgeschwindigkeit (CPI \leq 1) |
Unter dem CPI (cycles per instruction) -Wert einer Menge von Maschinenbefehlen versteht man die mittlere Anszahl der Taktzyklen pro Maschinenbefehl
Einzelzyklusmaschine
- Programmzähler (32 bit, PZ, engl. Program Counter, PC)
- Speichert und liefert die aktuelle auszuführende Instruktionsadresse
- an den Instruktionsspeicher (b) und das Addierwerk (a)
- übernimmt die Adresse der Folgeinstruktion (c)
- Addierwerk
- Fortlaufende Addition mit 4, da 4-Byte Instruktionen
- Der neue Wert für PZ wird im Register gespeichert (c)
- Die hintersten 2 Bit im PZ sind immer Null
- Instruktionsspeicher
- Liefert die auszuführende Maschineninstruktion
- Instruktionswort (32 bit)
- Gelesener Wert erscheint am Ausgang des Speichers
- Instruktionsformat bestimmt den weiteren Ablauf
- Master-Slave Flip-Flops
- Master übernimmt Wert bei steigender Taktflanke
- Slave übernimmt Wert bei fallender Taktflanke
- Instruktionszyklus beginnt bei fallender Taktflanke
- Ansteuerung des Registersatzes
- Register immer auslesen (kein Takt) und Transport zur ALU
- Schreiben des Zielregisters Register[rd] am Ende der Taktperiode
- Zeit für Speicherzugriff und für die primäre ALU muss eingeplant werden
- Ausgabe des Instruktionsspeichers wird über die ganze Dauer gehalten
- Vorzeichenerweiterung des Direktoperanden von 16 auf 32 Bit
- Erleichtert die Unterbringung kleiner Konstanten im Befehlswort
- Vom Steuerwerk aus abschaltbar für „unsigned“ Befehle
Decodierphase
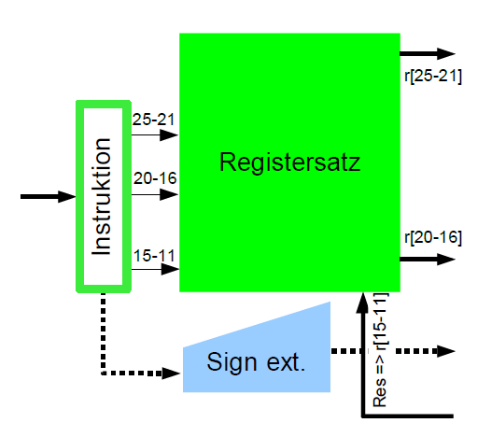 Zwei Register lesen, eines schreibt
Zwei Register lesen, eines schreibt
- Gelesene Register weiter zur ALU
- Drei Instruktionsfelder à 5 Bit
- Resultat zurück von ALU
z.B. R-Format Instruction opcode rs rt rd shamt func
- rt = IR[20-16] selektiert Register[rt] zur ALU
- rs = IR[25-21] selektiert Register[rs] zur ALU
- rd = IR[15-11] wählt Register[rd] für Resultat
z.B. I-Format Instruction opcode rs rt Direktoperand
- Ein Basis-/Indexregister: rs = IR[25-21]
- Ein Ziel-/Quellregister: rt = IR[20-16]
- Direktoperand: imm = IR[15-0]
Zeitverhalten:
- Register immer auslesen (kein Takt) und Transport zur ALU
- Schreiben des Zielregisters Register[rd] am Ende der Taktperiode
- Zeit für Speicherzugriff und für die primäre ALU muss eingeplant werden
- Ausgabe des Instruktionsspeichers wird über die ganze Dauer gehalten
Multiport-Registersatz
- Zwei gleichzeitige Lesezugriffe im selben Taktzyklus
- Kein Schreibzugriff bei Store-Operationen (Mem-Write)
- Zwei Lesebusse, ein Schreibbus zu den Registern
Ausführungsphase
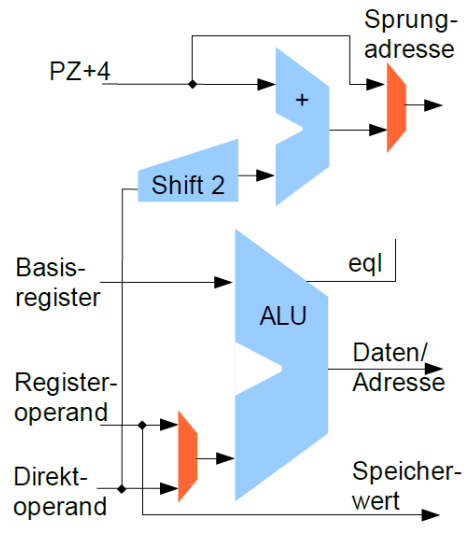
- ALU-Registeroperationen
- Operanden im Register oder als Direktoperand
- Üblicher Satz an ALU-Operationen
- Register $0 liefert Wert 0
- Adressierung von Variablen im Speicher
- Adressrechnung in der primären ALU
- Basisregister plus Direktoperand
- Registerinhalt lesen/schreiben
- Load/Store-Architektur
- Speicheroperationen können keine Arithmetik
- ALU schon zur Adressberechnung benötigt
- Separater Addierer zur Sprungzielberechnung
- Prüfschaltung auf Gleichheit zweier Register in der primären ALU ("eql")
- Bedingte Sprünge mit einem 16-bit Direktoperanden
- Maximal möglicher Offset von
\pm 17Bit nach einer 2-bit Verschiebung - Unbedingte Sprünge mit 28-bit Adresse später
Speicherzugriff
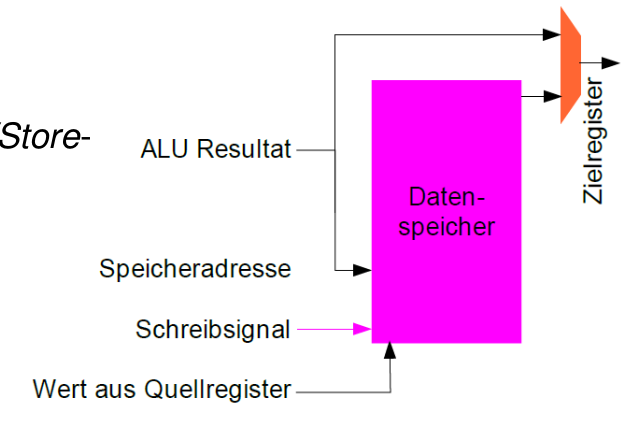
- Getrennte Speicher für Code & Daten
- Aktuelle Instruktion wird bis zum Ende des Gesamtzyklus gehalten
- Kein zweiter Zugriff im gleichen Taktzyklus möglich
- Quellregister speichern, falls Store
- Speichersteuerung durch besonderes Schreibsignal
- Zielregister laden
- Falls Ladebefehl aus dem Speicher
- Falls Rücksprungadresse (PC-magic)
- Falls Resultat aus ALU
- ALU-Resultat nutzen
- Für „Register Write-Back“
- Als Datenspeicheradresse
- Nicht direkt speichern, wg. Load/Store-Architektur!
Register zurückschreiben (Write Back)
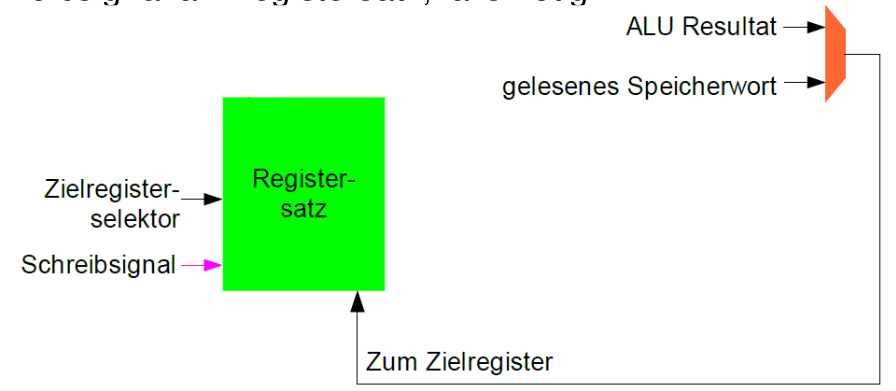
- Nummer des Zielregisters (Zielregisterselektor)
- Stammt aus IR[15-11] oder IR[20-16], 5-bit Bereich für Werte 0-31
- Steuersignal
- Zielregister zum Ende des Instruktionszyklus schreiben
- Schreibsignal an Registersatz, falls nötig
weitere Sprungbefehle
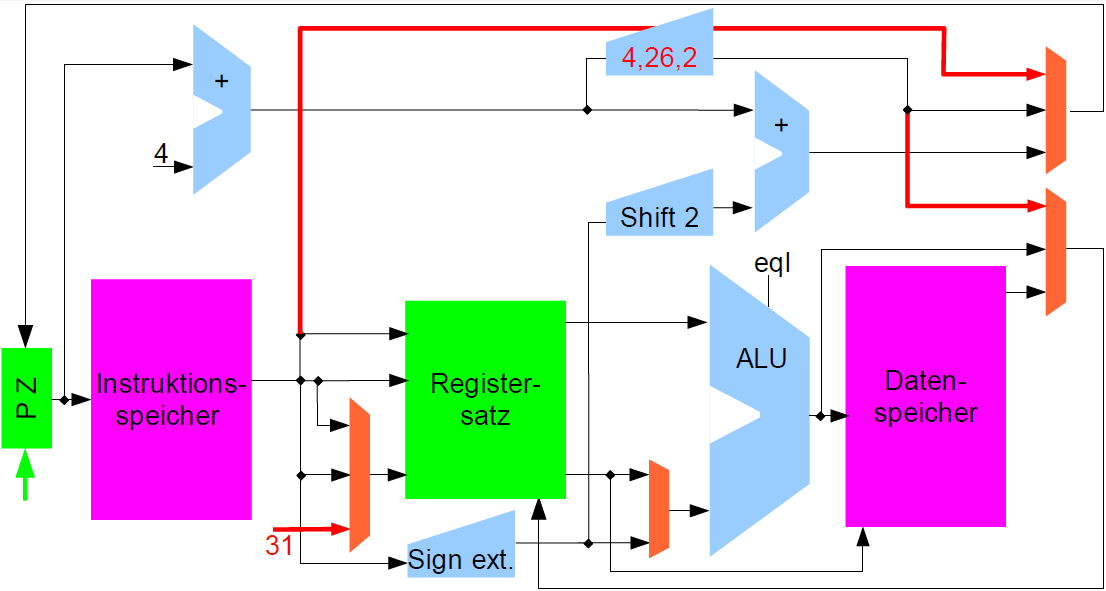
- Pseudorelative Sprünge (jump xLabel)
- Kein separater Addierer erforderlich, nur ein zusätzlicher MUX-Eingang
- Oberste 4 Bits unverändert, untere 28 Bits werden ersetzt (4, 26, 2)
- Jump-and-Link (jal) sichert alten Programmzähler in $31 (Subroutine)
erforderliche Steuerleitung
- Für Speicher
- 2-bit Steuersignal: 0/8/16/32 Bit zum Datenspeicher schreiben
- Instruktionsspeicher liest immer
- Für Registersatz
- 2-bit Steuersignal: 0/8/16/32 Bit zum Registerfile schreiben
- Für 4 Multiplexer
- 2-bit Steuersignal: Auswahl des Zielregisters (1 aus 3)
- 2-bit Steuersignal: Datenquelle für Zielregister
- 2-bit Steuersignal: Sprungziel wählen
- 1-bit Steuersignal: Direkt- oder Registeroperand für ALU
- Für Arithmetik
- 1-bit Steuersignal: Vorzeichenerweiterung ja/nein
- 6-bit Steuersignal: ALU-Operation
- Ca. 20 Steuersignale sind erforderlich: Mittelgroßes PLA auf Chip
Einzyklusmaschine ist unwirtschaftlich
- Komponenten arbeiten jeweils nur einen kleinen Teil der Gesamtzeit
- Zeitverlust bei potentiell kurzen Instruktionen
Mehrzyklen CPU
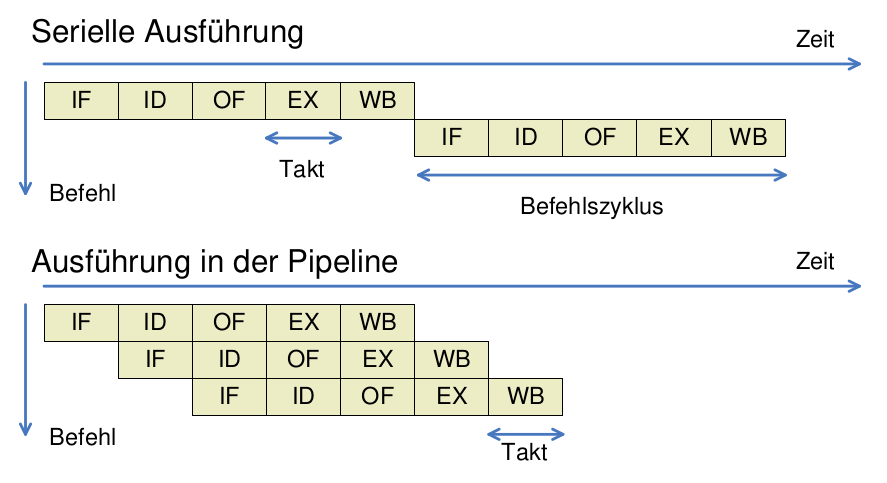
- Gesamtzyklus der bisherigen MIPS
- Dauer des Instruktionszyklus ist die Summe der Einzelverzögerungen
- Unteraktivitäten müssen abwarten, bis die Parameter sicher vorliegen
- Anderenfalls können sich „spurious writes“ ergeben
- z.B. in Registersatz oder in den Speicher
- Mehrzyklen-CPU als Überleitung zum Fließbandprinzip
- Aufteilung der Befehlsausführung auf mehrere gleich lange Taktzyklen
- Einfügen von Registern für in den Stufen entstandene Zwischenresultate
- Noch immer nur eine Instruktion zu einem Zeitpunkt in Ausführung
- CPU-Zustand bezieht sich auf eine einzelne aktuelle Instruktion
- Pipelined CPU - mit Fließbandprinzip
- In jedem Taktzyklus beginnt eine neue Maschineninstruktion
- Mehrere Instruktionen gleichzeitig in Ausführung
- Aber unterschiedlicher Fertigstellungsgrad
- Bessere Auslastung der Hardware
- Höherer Durchsatz
- Große Pipeline-Tiefe:
- Zusätzliche Ressourcen, höherer Energieaufwand (Taktfrequenz!)
- Längere Instruktionssequenzen für gleichen oder besseren Speedup (→ Registeroverhead!)
- Bei unterschiedlichen Stufenverzögerungen bestimmt die langsamste Stufe die Taktfrequenz
- Lange Instruktionssequenzen:
- Meist wegen Daten- und Kontrollabhängigkeiten nicht machbar
- Hohe Latenz – Füllen und Leeren der Pipeline!
- Warum geht die Anzahl der Pipeline-Stufen zurück?
- hoher Energieverbrauch
- hohe Leistungseinbußen durch Kontroll- und Datenabhängigkeiten (Füllen/Leeren der Pipeline)
- mehr Parallelität in den einzelnen Pipeline-Stufen → superskalare Prozessoren
- mehr Prozessorkerne mit geringerer Leistungsaufnahme pro Kern
- Fließband-Architektur (engl. pipeline architecture): Bearbeitung mehrerer Befehle gleichzeitig, analog zu Fertigungsfließbändern.
- Aufteilung des Rechenwerks in Fließbandstufen, Trennung durch Pufferregister (IF/ID,ID/EX,EX/MEM, MEM/WB)
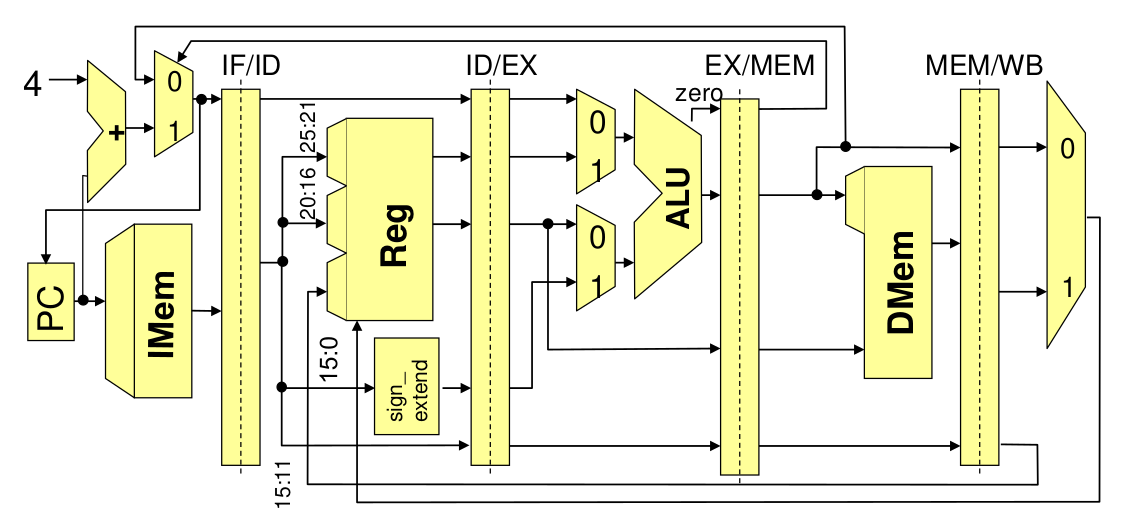
Aufgaben der einzelnen Phasen
- Befehlsholphase
- Lesen des aktuellen Befehls; separater Speicher, zur Vermeidung von Konflikten mit Datenzugriffen
- Dekodier- und Register-Lese-Phase
- Lesen der Register möglich wegen fester Plätze für Nr. im Befehlswort
- Ausführungs- und Adressberechnungsphase
- Berechnung arithmetischer Funktion bzw. Adresse für Speicherzugriff
- Speicherzugriffsphase
- Wird nur bei Lade- und Speicherbefehlen benötigt
- Abspeicherungsphase
- Speichern in Register, bei Speicherbefehlen nicht benötigt
Pipeline-Hazards
Structural Hazards ("strukturelle Abhängigkeiten oder Gefährdungen"): Verschiedene Fließbandstufen müssen auf dieselbe Hardware-Komponente zugreifen, weil diese nur sehr aufwändig oder überhaupt nicht zu duplizieren ist.
- resource hazards
- data hazards: Datenabhängigkeiten
- Antidatenabhängig: falls Befehl j eine Speicherzelle beschreibt, die von i noch gelesen werden müsste.
- WAR (write after read) Abhängigkeit
- Ausgabeabhängig: falls Befehle i und j die selbe Speicherzelle beschreiben
- WAW (write after write) Abhängigkeit
- Datenabhängigkeit: Operation hängt von der vorhergehenden Operation ab
- RAW (read after write) Abhängigkeit
- Antidatenabhängig: falls Befehl j eine Speicherzelle beschreibt, die von i noch gelesen werden müsste.
- control hazards: Kontrollabhängigkeiten
- Gleichheit der Register wird schon in der instruction decode-Stufe geprüft
- Sprungziel wird in separatem Adressaddierer ebenfalls bereits in der instruction decode-Stufe berechnet
Gegenmaßnahmen
- pipeline stall (Anhalten des Fließbandes, NOOPS(s) einfügen)
- branch prediction
- forwarding / bypassing
- delayed branches (nächsten Befehl einfach ausführen)
- out-of-order execution
- dynamic sched
Sprungvorhersage
Je mehr die Parallelität ausgenützt werden soll, desto mehr sind Kontrollkonflikte der limitierender Faktor!
- wichtig für single-issue Prozessoren (pro Takt ein Befehl ausgegeben)
- aber essentiell für multiple-issue (n Befehle pro Takt ausgegeben)
Dynamische Sprungvorhersage
- Zur Laufzeit durch Prozessor-Hardware
- Vorhersage, ob ein bedingter Sprung genommen wird oder nicht
- Abhängig von der Vorhersage: Füllen der Prozessor-Pipeline mit Befehlen ab der vorhergesagten Programm-Stelle
- Reduktion der branch penalty, falls vorhergesagtes Programm-Verhalten mit tatsächlichem übereinstimmt
- jedoch: Vorhersagen sind schwierig
Einfache lokale Prädiktoren
- Liefern Vorhersage, ob bedingter Sprung genommen wird oder nicht
- Prädiktion allein anhand der Historie des betrachteten, aktuellen Sprungs
- Historie eines Sprungs wird mit 1, 2 oder n Bits gepuffert
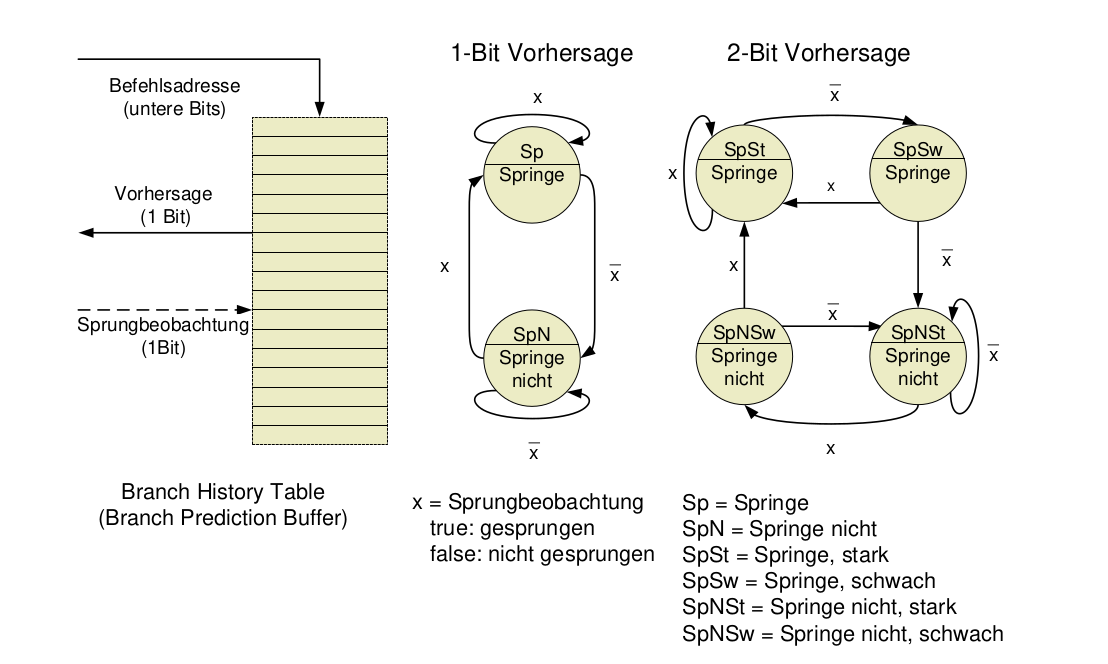
Einfache Sprungvorhersage (1 Bit)
- Sprungvorhersage-Puffer
- Branch prediction buffer oder branch history table
- Kleiner Speicher, der mit (Teil der) Adresse des Sprungbefehls indiziert wird
- Verwendet nur wenige untere Bits der Adresse
- Enthält 1 Bit: Sprung beim letzten Mal ausgeführt (taken) oder nicht (not taken)
- Prädiktion: Sprung verhält sich wie beim letzten Mal
- Nachfolgebefehle ab vorhergesagter Adresse holen
- Falls Prädiktion fehlerhaft: Prädiktionsbit invertieren
- Alle Sprünge, deren Adressen im Indexteil übereinstimmen, werden derselben Zelle im branch prediction buffer zugeordnet.
- Einfachste Art von Puffer (keine Tags, d.h. keine Überprüfung, ob Adresse tatsächlich im Puffer)
- Entspricht sehr einfachem Cache
- Hat eine bestimmte Kapazität
- Kann nicht für alle Sprünge (aktuelle) Einträge enthalten
- Reduziert branch penalty nur, wenn branch delay länger als Berechnung der Zieladresse mit branch prediction buffer dauert
- Prädiktion kann fehlerhaft sein
- Prädiktion kann von anderem Sprungbefehl stammen (mit gleichen Bits im Indexteil der Adressen)
Einführung von Tag Bits
- Nachteile des einfachen 1-Bit Vorhersageschemas
- Höhere Fehlerrate als überhaupt möglich, wenn Häufigkeit der Sprungentscheidungen betrachtet wird
- D.h. auch wenn Sprung fast immer ausgeführt (taken) wird, entstehen 2 Fehler anstatt 1
- Tag beseitigt eines der Probleme: gültiger Eintrag, falls Tag-Bits gleich sind
- Alle Sprünge, deren Adressen im Indexteil übereinstimmen, werden derselben Zelle im branch prediction buffer zugeordnet. Überprüfung mittels tags, ob es der richtige Eintrag ist.
- Allgemein: Fehlerrate von 1-Bit Prädiktor ist für Sprünge in Schleifenkonstrukten doppelt so hoch wie die Anzahl ausgeführter Sprünge
2 Bit Vorhersagen
- Änderung der Vorhersage nur, wenn 2 falsche Vorhersagen in Folge
- 2-Bit Branch-Prediction Buffer: Speicherung der Historie, Befehlsadressen als Zugriffsschlüssel
Vorhersagequalität für 2-Bit Prädiktor
- Studie von 1992 für SPEC89 auf IBM Power-Architektur
- Qualität nicht durch die Größe des Speichers beschränkt
- Fehlerwahrscheinlichkeit höher für Integer-Programme (gcc, eqntott)
n-Bit Prädikator
Allgemein: n-Bit Prädiktor (Spezialfall: 2-Bit)
- Verwendet n-Bit Zähler
- Sättigungsarithmetik (kein wrap around bei Überlauf)
- Kann Werte zwischen 0 und
2^{n-1}annehmen - Wenn Zähler größer als Hälfte des Maximums
(2^{n-1}): Vorhersagen, dass Sprung ausgeführt wird; ansonsten vorhersagen, dass Sprung nicht genommen wird - Zähler wird bei ausgeführtem Sprung inkrementiert und bei nicht ausgeführtem dekrementiert
- In der Praxis: 2-Bit Prädiktor ähnlich gut wie n-Bit Prädiktor
- In den meisten Prozessoren heute: 2-Bit Prädiktor für (lokale) Vorhersage
Korrelierende Prädikatoren
- Einschränkung des n-Bit (bzw. 2-Bit) Prädiktors:
- Betrachtet nur (vergangenes) Verhalten eines Sprungs, um dessen (zukünftiges) Verhalten vorherzusagen.
- Arbeitet rein lokal!
- Idee: Verbesserung durch Betrachtung des Verhaltens anderer Sprünge
- Man erhält so genannten korrelierenden Prädiktor (correlating predictor) oder zweistufigen Prädiktor
- Prinzip: Aufgrund globaler Information (anderer Sprünge) wird einer von mehreren lokalen Prädiktoren ausgewählt
- Beziehen zur Vorhersage des Verhaltens eines Sprungs Kontext-Information mit ein, d.h. die Historie anderer Sprungbefehle
- Prädiktor benutzt globale Kontext-Bits, um einen von mehreren lokalen Prädiktoren auszuwählen
- Betrachten wiederholte Ausführung des Codefragments (ignorieren dabei alle anderen Sprünge, inkl. dem für Wiederholung)
Zweistufiger Prädiktor
- Verwendet 1 Bit Kontextinformation
- Es existieren 2 lokale Prädiktoren, beide je 1-Bit
- Kontext: Letzter (i.a. anderer) Sprung wurde ausgeführt/nicht ausgeführt (1 Bit)
- Vorhersage des zweistufigen Prädiktors: Anhand des Kontexts wird lokaler Prädiktor für die Vorhersage des aktuell betrachteten Sprungs ausgewählt
- Letzter Sprung ist i.a. nicht gleich aktuellem, vorherzusagendem Sprung (nur in einfachen Schleifen)
- Notation des Prädiktorstatus:
<X>/<Y>mit<X>: Vorhersage, falls letzter Sprung not taken, d.h. Kontext = NT<Y>: Vorhersage, falls letzter Sprung taken, d.h. Kontext = T<X>und<Y>Vorhersagen: jeweils entweder T oder NT
(m,n)-Prädiktor
- Betrachtet als Kontext das Verhalten der letzten m Sprünge, um aus
2^mvielen lokalen Prädiktoren einen n-Bit Prädiktor auszuwählen - Vorteil gegenüber (rein lokalem) 2-Bit Prädiktor
- Höhere Vorhersagegenauigkeit
- Erfordert kaum Hardwareaufwand
- Sprunggeschichte (Kontext, „Ausgang“ vorangegangener Sprünge) kann in m-Bit Schieberegister gespeichert werden (1 Bit für jeden der m vielen letzten Sprünge im Kontext, Bit gleich 1 wenn Sprung taken)
- Vorhersagepuffer adressiert via Konkatenation von
- Unteren Adressbits der Sprungbefehlsadresse
- m Bit globaler Sprunggeschichte
High Performance Befehlsdekodierung
In Hochleistungs-Pipelines ist reine Vorhersage eines Sprungs i.d.R. nicht ausreichend
- Insbesondere: Falls mehrere Befehle pro Takt auszugeben sind
- Befehlsstrom mit großer Bandbreite erforderlich!
- Kontrollflussabhängigkeiten dürfen nicht „wahrnehmbar“ sein
- Maßnahmen hierfür
- Pufferung von Sprungzielen, und nicht nur Vorhersage des Sprungverhaltens (branch target buffer)
- Integrierte Einheit für das Holen der Befehle (d.h. nicht nur [relativ] einfache erste Stufe der Pipeline)
- Vorhersage von Rücksprungadressen (bei Prozeduraufruf)
Branch Target Buffer
5-stufige Pipeline, Auswertung von Sprungbedingungen in EX:
- Branch delay von 2 Takten
- Mit Sprungvorhersage (branch prediction buffer)
- Zugriff erfolgt in ID (Adresse des Sprungbefehls schon in IF bekannt; aber:
- evtl. angesprungenes Ziel erst nach Befehlsdecodierung [ID])
- Nächste vorhergesagte Instruktion kann erst nach ID geholt werden
- Branch delay = 1, falls Prädiktion korrekt
- Mit Pufferung des Sprungziels (branch target buffer)
- Zugriff auf branch target buffer erfolgt in IF. Verhalten wie „echter“ Cache,
- adressiert mit Sprungbefehlsadresse (überprüft, ob Cache-Hit)
- Liefert vorhergesagte Adresse als Ergebnis, d.h. nächsten PC (d.h. nicht nur Vorhersage über Sprungverhalten)
- Keine Verzögerung, falls Prädiktion korrekt!
Zusätzliche Speicherung auch des Sprungziels, z.B. Kombination mit branch prediction buffer
Bei geschickter Organisation kann das Fließband immer gefüllt bleiben; die Sprünge kosten dann effektiv keine Zeit; CPI <1 möglich.
Eigenschaften
- Verzögerung durch Sprung kann vollständig vermieden werden (sofern Vorhersage korrekt), da bereits in IF Entscheidung über nächsten Befehlszähler (PC) getroffen wird.
- Da Entscheidung allein auf Basis des PC getroffen wird, muss überprüft werden, ob Adresse im Puffer (impliziert, dass Sprungbefehl vorliegt)
- Speicherung im Prinzip nur für Sprünge notwendig, die als ausgeführt vorhergesagt werden (not taken = normale sequentielle Dekodierung geht weiter)
- Achtung – bei falscher Vorhersage
- Entsteht ursprüngliche Sprung-Verzögerung, plus
- Aufwand zur Aktualisierung des Vorhersagepuffers
Integrierte Befehls-Hol-Einheit (IF Unit)
Insbesondere mit Blick auf multiple-issue Prozessoren eigene (autonome) funktionale Einheit für Befehlsholphase
- Führt Befehlscodes in Pipeline ein
- Integrierte Funktionalitäten
- Sprungvorhersage: Wird Teil der Befehlsholphase
- Instruction Pre-fetch: Insbes. um mehrere Befehle pro Takt liefern (und später ausgeben) zu können, läuft Befehlsholen weiterer Dekodierung voraus (= pre-fetch)
- Zugriff auf Befehlsspeicher: Bei mehreren Befehlen pro Takt mehrere Zugriffe erforderlich (bei Cache auf ggfs. mehrere cache lines). Werden hier koordiniert/geplant
- Befehlspuffer: Befehle können hier (lokal im Prozessor!) von Issue-Stufe nach Bedarf abgerufen werden
Vorhersage von Rücksprungadressen
Allgemeines Ziel: Vorhersage indirekter Sprünge (d.h. bzgl. Basisadresse in Register)
- Hauptverwendung: Rückkehr aus Prozeduraufrufen
- MIPS: Prozeduraufruf per jal proc, Rückkehr per jr $31
- Vorhersage mit branch target buffer schlecht, da Aufruf aus unterschiedlichen Codeteilen heraus möglich
- Methode: (Stack-) Speicher für Rücksprungadressen
- Push bei Prozeduraufruf (call), und
- Pop bei Rücksprung (return)
- Vorhersagequalität „perfekt“, wenn Stack-Puffer größer als maximale Aufruftiefe
Multiple-Issue-Architekturen
Mehrere Ausführungseinheiten
- Techniken der vorangegangenen Abschnitte geeignet, um Daten- und Kontrollkonflikte zu lösen
- Idealer CPI ~1
- Weitere Leistungssteigerung:
- CPI < 1
- Mehrere Befehle pro Takt ausgeben (fertigstellen)
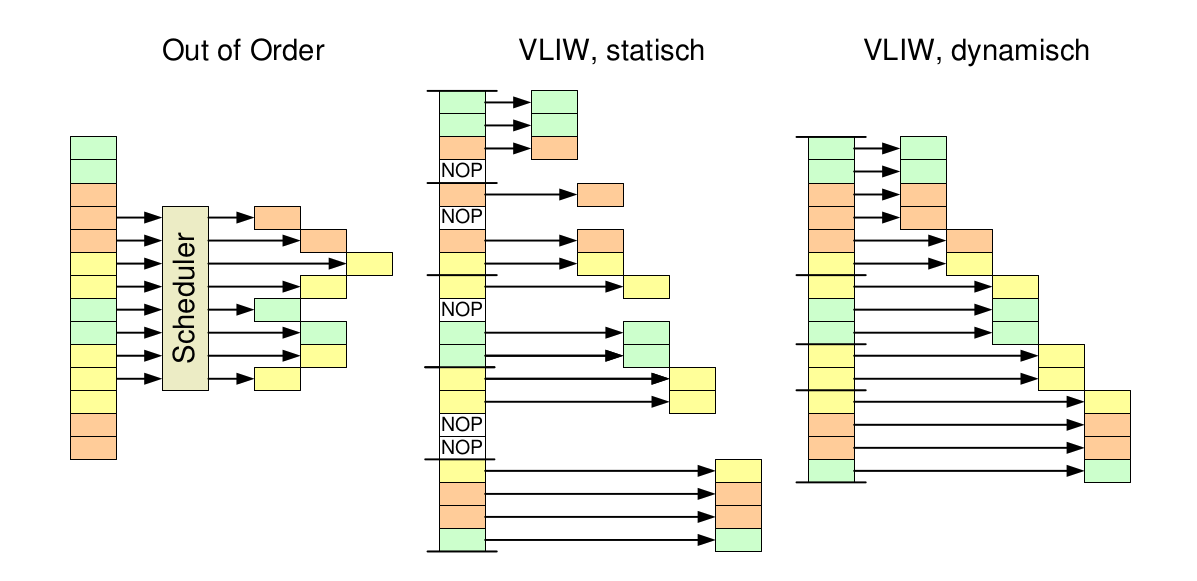
- Zwei Grundtypen von multiple-issue Prozessoren:
- Superskalar
- Geben variable Anzahl von Befehlen pro Takt aus
- Mit statischem (vom Compiler erzeugtem) oder dynamischem Scheduling in Hardware
- VLIW/EPIC
- Feste Anzahl von Befehlen ausgegeben, definiert durch Befehlscode (weitgehende Planung der Issue-Phase durch Compiler)
- Superskalar
Superskalar
statisch: Details der Befehlsausgabe
- In IF werden 1-n Befehle von Instruction Fetch Unit geholt (ggfs. Max. von n nicht immer möglich, z.B. bei Sprüngen)
- Befehlsgruppe, die potentiell ausgegeben werden kann = issue packet
- Konflikte bzgl. Befehlen im issue packet werden in Issue-Stufe in Programmreihenfolge (d.h. in-order) geprüft
- Befehl ggfs. nicht ausgegeben (und alle weiteren)
- Aufwand für Prüfung in Issue-Stufe groß!
- Wegen Ausgewogenheit der Pipeline-Stufen ggfs. Issue weiter „pipelinen“, d.h. in mehrere Stufen unterteilen = nicht-trivial
- Parallele Ausgabe von Befehlen limitierender Faktor superskalarer Prozessoren!
MIPS mit statischem Scheduling
- Annahme: 2 Befehle pro Takt können ausgegeben werden (1x ALU, Load/Store plus 1x FP)
- Einfacher als 2 beliebige Befehle (wegen „Entflechtung“)
- Befehlsstart umfasst
- 2 Befehlsworte holen (64-Bit Zugriff, d.h. komplexer als bei nur 1 Befehl - ggfs. Pre-fetch?)
- Prüfen, ob 0, 1 oder 2 Befehle ausgegeben werden können
- Befehl(e) ausgeben an korrespondierende funktionale Einheiten
- Prüfen auf Konflikte durch Entflechtung vereinfacht
- Integer und FP-Operationen nahezu unabhängig (verschiedene Registersätze)
- Abhängigkeiten nur bei Speichertransfers möglich (von Integer-ALU für FP ausgeführt) - Einschränkung des issue
- Leistungssteigerung nur bei „geeignetem“ Anteil von FP-Operationen im Programm sowie geeigneter „Verflechtung“ durch Compiler!
Dynamisches Befehlsscheduling – in-order execution
Bislang
- Reihenfolge der Befehlsabarbeitung = Reihenfolge der Befehle im Speicher, abgesehen von Sprüngen
- Behindert schnelle Ausführung
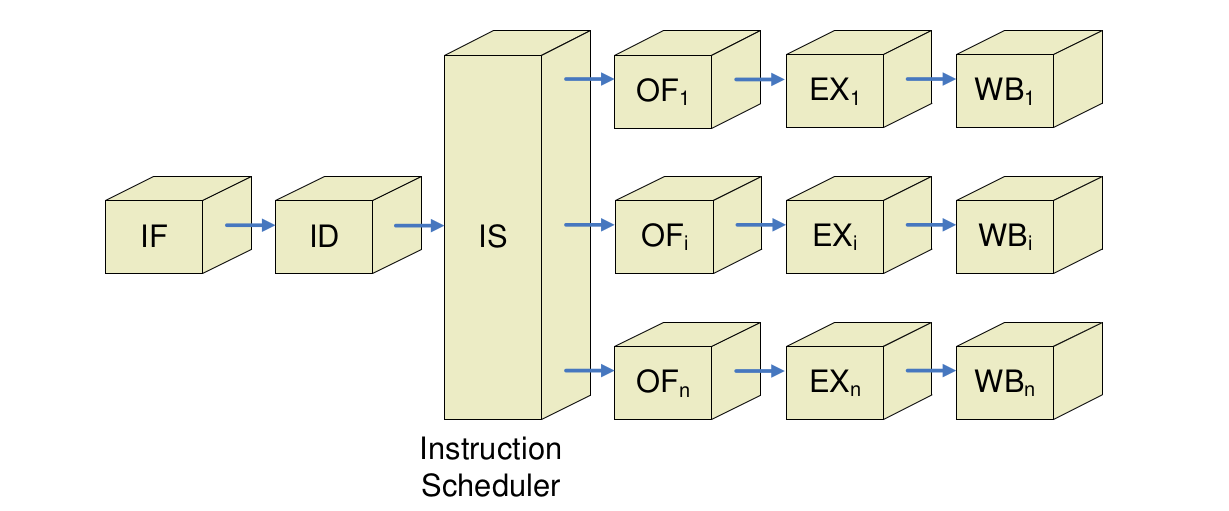
Scoreboarding
- Jeder Befehl, der aus der Instruction fetch-Einheit kommt, durchläuft das Scoreboard.
- Wenn für einen Befehl alle Daten/Operanden bekannt sind und die Ausführungseinheit frei ist, wird der Befehl gestartet.
- Alle Ausführungseinheiten melden abgeschlossene Berechnungen dem Scoreboard.
- Dieses erteilt Befehlen die Berechtigung zum Abspeichern von Ergebnissen, sofern
- Speichereinheit frei ist und
- Antidaten- und Ausgabeabhängigkeiten berücksichtigt sind und prüft, ob dadurch neue Befehle ausführbereit werd
- Zentrale Datenstruktur hierfür: Scoreboard (deutsch etwa „Anzeigetafel“ [für Befehlsstatus])
- Ursprünglich realisiert für CDC 6600 (1964):
- load/store-Architektur
- mehrere funktionale Einheiten (4xFP, 6xMem, 7xInteger ALU)
- Scoreboarding für MIPS nur sinnvoll
- für FP-Pipeline (Operationen mit mehreren Taktzyklen)
- und mehrere funktionale Einheiten (hier: 2 x Mult, Div, Add, Int)
- Ursprünglich realisiert für CDC 6600 (1964):
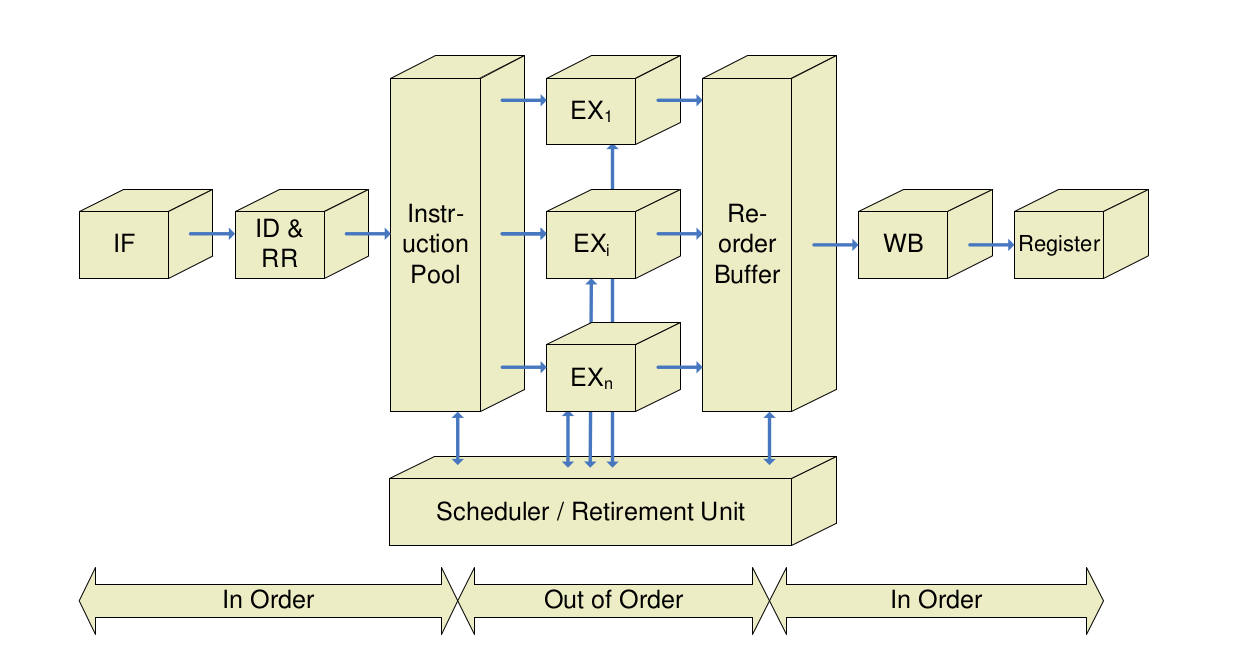
Verfahren von Tomasulo
- Erdacht für IBM 360
- Verfahren von Tomasulo erlaubt auch bei Ausgabe- und Antidatenabhängigkeiten, die Reihenfolge zu vertauschen
- Umbenennung der Register; verschiedenen Benutzungen eines Registers werden verschiedene Speicherzellen zugeordnet
- Jeder funktionalen Einheit wird eine Reservation Station zugeordnet
- Reservation Stations enthalten die auszuführende Operation und, soweit bekannt, die Operanden bzw. eine Kennzeichnung in Form von tag bits des Operanden
- Sind alle Operanden bekannt und ist die funktionale Einheit frei, so kann die Bearbeitung beginnen
- Am Ende der Bearbeitung wird das Ergebnis von allen Einheiten übernommen, die das Ergebnis benötigen
- Verteilen der Daten erfolgt vor der Abspeicherung im Registerspeicher
- Aus den tag bits geht hervor, aus welcher Einheit der Operand kommen muss
- Registeradressen werden dynamisch auf größere Anzahl von Plätzen in den Reservation Stations abgebildet, d.h. Register effektiv umbenannt. Performance-Beschränkungen wegen weniger Register werden so umgangen
Register Renaming
- Prinzip: Verwendung temporärer Register für (logisch) neue möglicherweise interferierende Belegung
- Beispiel
- Annahme: es existieren zwei temporäre Register S und T
- Kollidierende Belegungen von F8 durch
sub.dbzw. F6 durchadd.din (eindeutige) temporäre Register „umleiten“div.d $F0,$F2,$F4 add.d $T,$F0,$F8 // Lesen von F8, Schreiben von T (F6) s.d $T,0($R1) // Lesen von T (F6) sub.d S,$F10,$F14 // Schreiben von S (F8) mul.d $F6,$F10,S // Schreiben von F6
- Alle Namenskonflikte durch Umbenennung auflösbar (Voraussetzung: genügend temporäre Register)
- Weitere Verwendung von F8/F6 durch S/T ersetzen!
- Wichtige Hardwarestruktur: Reservation Stations
- Zugeordnet zu funktionalen Einheiten (i.d.R. eine pro Einheit)
- Arbeitsweise von Reservation Stations
- Puffern Operanden für Befehle (sobald verfügbar/geladen)
- Müssen nicht aus Registern gelesen werden!
- Ausstehende Operanden verweisen auf Reservation Station, die Eingabe bereitstellen wird
- Bei aufeinander folgenden Schreibzugriffen auf Register: Nur letzter für Aktualisierung des Inhalts verwendet
- Puffern Operanden für Befehle (sobald verfügbar/geladen)
- Wichtige Eigenschaften der Verwendung von Reservation Stations anstelle des zentralen Registersatzes
- Konfliktdetektion und Ausführungskontrolle verteilt
- Informationen in Reservation Stations bei den funktionalen Einheiten bestimmen, wann Ausführung eines Befehls möglich ist
- Ergebnisse werden direkt zu den funktionalen Einheiten (in jeweiliger Reservation Station) weitergereicht
- Erweiterte Form des Forwarding
- Realisiert implizit Register Renaming
- Möglich durch gemeinsamen Ergebnisbus (common data bus)
- Konfliktdetektion und Ausführungskontrolle verteilt
Multiple-Issue mit dynamischem Scheduling
- Wesentlicher Nachteil von statischem Scheduling für superskalare Prozessoren: Latenzzeiten werden ca. mit Länge des issue packets skaliert
- „Längere“ Verzögerung (in Anzahl Befehlen) für Load/Stores bzw. Branches
- Lösung: Erweiterung des Tomasulo-Algorithmus auf Multiple-Issue durch
- Sequentielles Ausgeben mehrerer Befehle an Reservation Stations innerhalb eines Taktes, oder
- „Verbreiterung“ der Ausgabe-Logik (issue logic) zur Behandlung mehrerer Operationen parallel
- (alle Abhängigkeiten gleichzeitig überprüfen!)
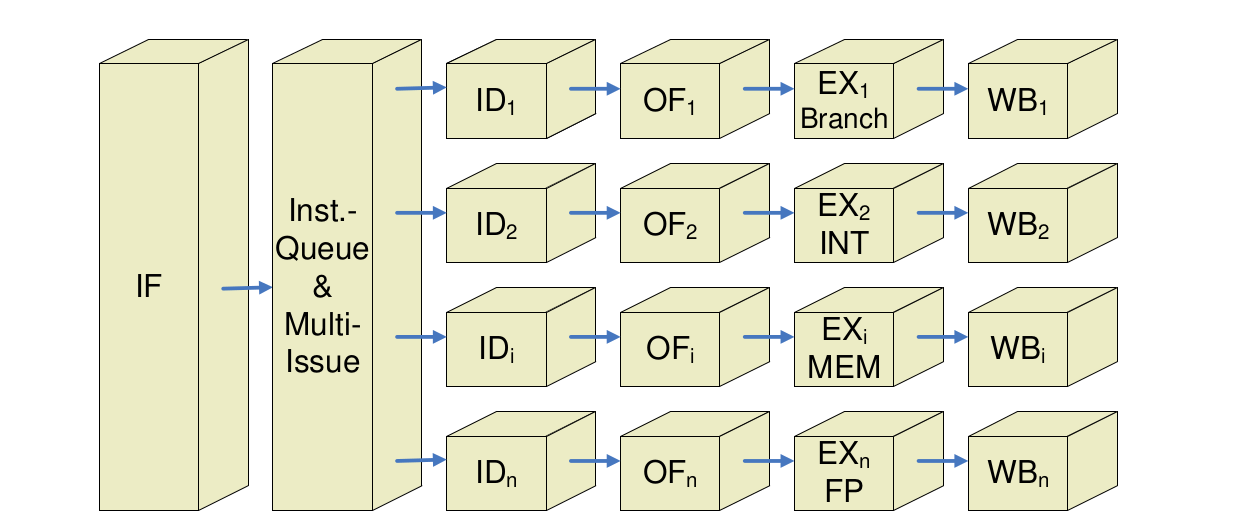
VLIW - Very Long Instruction Word
VLIW (Very Long Instruction Word)-Prozessor
-
verschiedene parallele Ausführungseinheiten
-
Verteilung von Maschinencode direkt vom Befehlswort im Speicher vorgegeben
-
Sieht für jede Ausführungseinheit dezidierte Anweisungen vor
-
keine Abhängigkeiten daher geringere Komplexität in Hardware
-
Meist für stark parallelisierbare Aufgaben verwendet (Signalverarbeitung, Vektorrechner, DSP)
-
Vorteile:
- Die parallele Architektur des Prozessors kann schon während der der Programmerstellung (Kompilieren) zur Optimierung genutzt werden.
- Keine aufwendige Prozessorhardware zur Befehlsverteilung/Abhängigkeitsanalyse erforderlich (einfacherer Prozessor)
- Ausführungszeiten sind im wesentlichen bekannt
-
Nachteile:
- Aufwendigere Compiler
- Schlechte Prozessorauslastung bei ungünstigem Code
- Rekompilierung für den Prozessor erforderlich (kein Universalrechner)
- Größerer Speicherbedarf (Programm), wenn Code nicht parallelisiert werden kann.
EPIC = Explicitely Parallel Instruction Computing = IA64
- Im wesentlichen Prinzip des VLIW-Prozessors
- Umsortieren der Befehle und Auflösung der Abhängigkeiten werden durch den Compiler durchgeführt
- Hauptnachteil; Neukompilierung erforderlich)
- Keine statische Aufteilung auf Funktionseinheiten
- Effizienteres Befehlswort - Keine Verwendung von zwangsweise NOPs
Bei der IA64-Architektur werden verschiedene Ansätze verfolgt, um die Prozessorlogik zu vereinfachen.
- Bedingte Befehlsverarbeitung
- Ein Befehl wird abhängig von einem Statusbit ausgeführt
- Dadurch kann die Sprungvorhersage bei einfachen if-then-else Zweigen entfallen
- Die then und else Befehle sind parallel, wobei jeweils nur einer ausgeführt wird
- Statische Sprungvorhersage (Compiler)
- Die Optimierung (Finden paralleler Befehle) wird im wesentlichen dem Compiler überlassen.
- Spekulatives Laden von Operanden
- Möglichst geringe Wartezeit auf Operanden
- Schon im Compiler werden entsprechende Ladebefehle vorgezogen.
Simultaneous Multithreading (SMT)
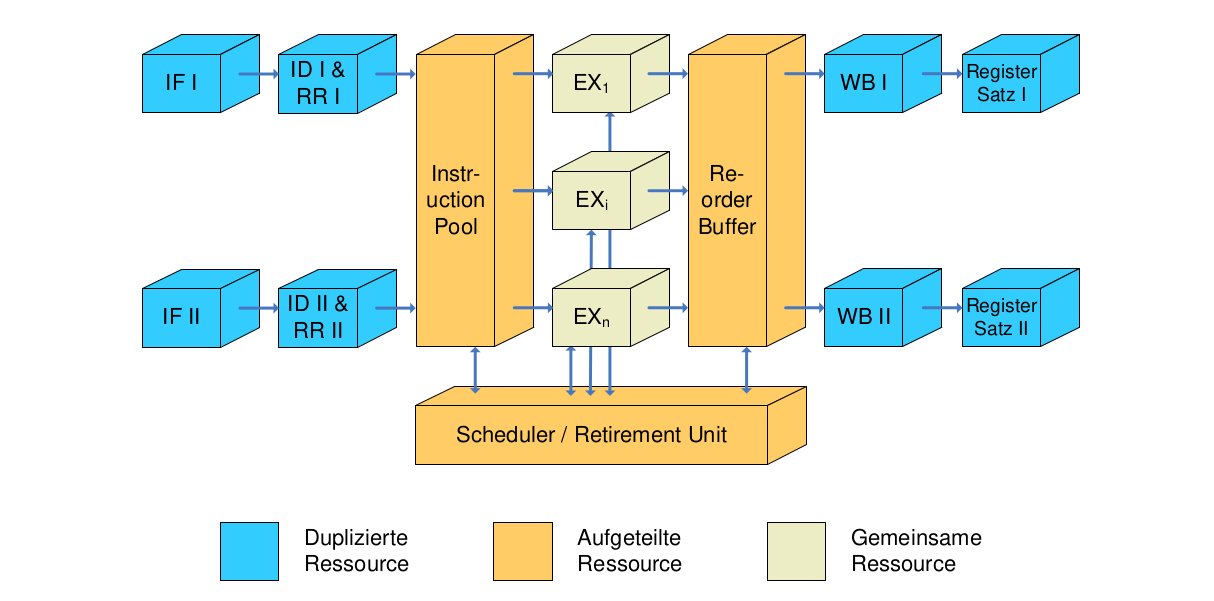
- Modellprozessor I (2-fach Superskalar)
- Modellprozessor II (2-fach Out-of-Order)
Ansätze zur Effizienzsteigerung durch Mikroparallelität
| Bezeichnung | Konflikterkennung | Issue-Struktur | Scheduling | Hauptmerkmal | Beispiele |
|---|---|---|---|---|---|
| Superskalar (statisch) | Hardware | Dynamisch | Statisch | In-order Execution | Sun UltraSPARC II/ III |
| Out of Order | Hardware | Dynamisch | Dynamisch mit Spekulation | Out of Order mit Spekulation | Pentium III, Pentium 4, MIPS 10000 |
| VLIW | Software | Statisch | Statisch | Keine Konflikte | Trimedia, diverse DSPs |